 Děkujeme, že vás zajímají detaily o našich stanovištích!
Děkujeme, že vás zajímají detaily o našich stanovištích!
Aktuálně pro vás připravujeme kompletní přehled všech aktivit, které chystáme – a některé z nich si již nyné můžete prohlédnout na této stránce. Informace o jednotlivých stanovištích, tématech, která pokrývají, i lidech, se kterými se na místě potkáte, zde postupně přibývají, pečlivě tedy sledujte, ať vám nic neuteče.
Doporučujeme vám projít si přehled dostupných stanovišť níže a zjistit, co vás nejvíce zaujme. Těšíme se na viděnou!
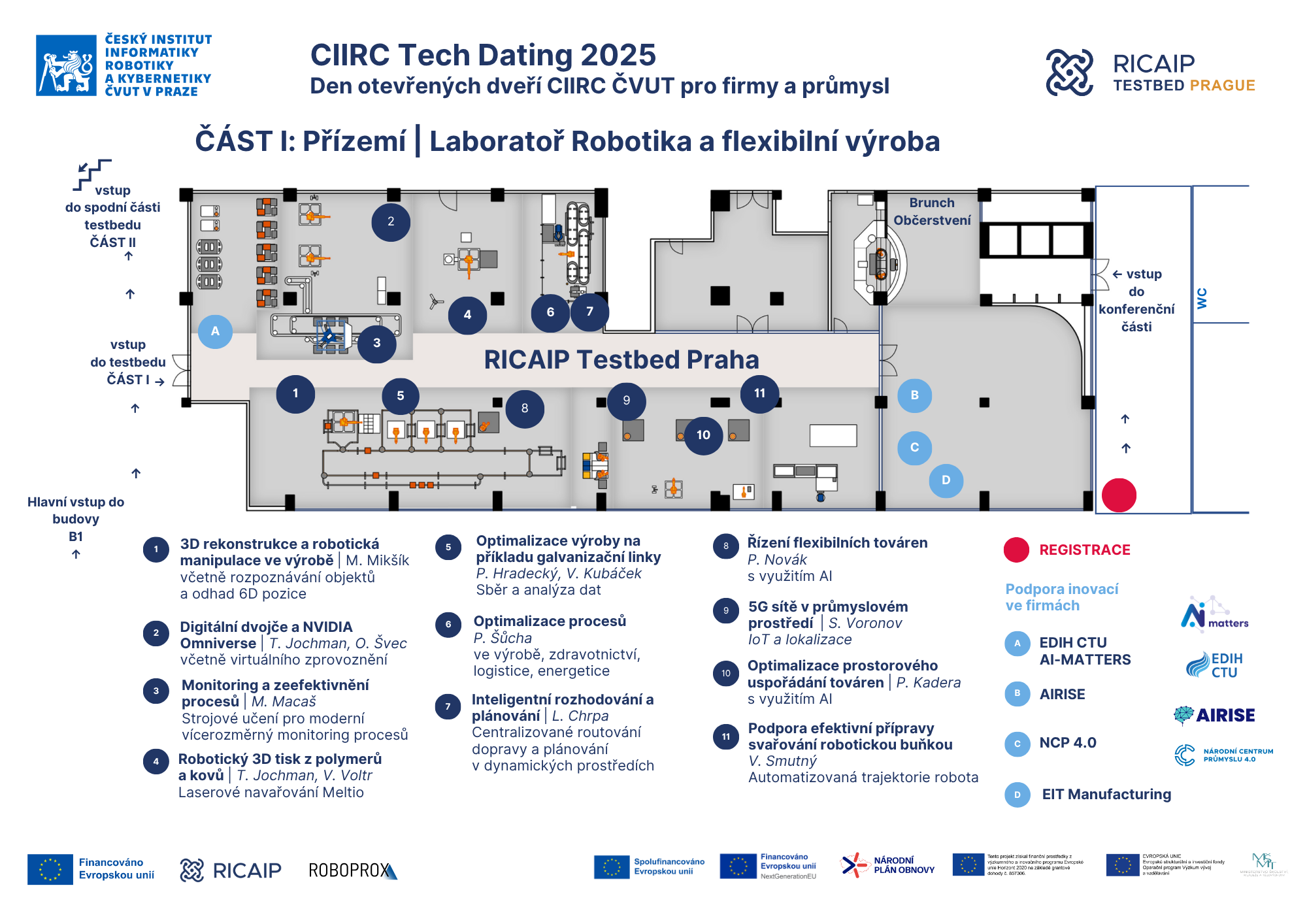

1: 3D rekonstrukce a robotická manipulace ve výrobě vč. 3D gripper
Zaměření: 3D rekonstrukce a robotická manipulace ve výrobě
Garant: Martin Mikšík, Artem Moroz
Místnost: RICAIP Testbed Praha, přízemí, budova B
Naše vlastní robotické rameno precizně oskenuje objekt a vytvoří jeho přesný digitální 3D model. Díky speciální kalibrační metodě dosahujeme velmi vysoké přesnosti skenování. Vytvořený 3D model následně využívají další roboti pro úkoly, jako je například vybírání objektů z přepravky (tzv. bin picking). Klíčovou technologií je zde metoda pro 6D odhad polohy, vyvinutá zde na CIIRC ČVUT. Šest stupňů volnosti (6D) popisuje kompletní pozici a orientaci objektu v prostoru. Zahrnuje tři souřadnice pro určení polohy (kde se objekt nachází v osách x,y,z) a tři úhly pro určení jeho natočení. Robot vybavený kamerou používá tuto pokročilou metodu umělé inteligence k tomu, aby v reálném čase porovnal obraz z kamery s digitálním 3D modelem a dokázal tak přesně uchopit daný díl. Tento systém je dále doplněn pokročilou technologií pro automatické generování 3D modelu specifického nástroje – přísavkového chapadla. Na základě přesného CAD modelu manipulovaného objektu a uživatelem předdefinovaných bodů, ve kterých má být objekt ideálně uchopen, dokáže náš software automaticky navrhnout a vygenerovat optimalizovaný 3D model přísavkového chapadla. Kombinace těchto technologií umožňuje automatizovat komplexní manipulační úkoly, které byly dříve náročné nebo nebezpečné pro lidskou obsluhu, a přispívá tak k rozvoji flexibilní a bezpečné robotizované výroby v rámci konceptu Průmyslu 4.0.
2: Digitální dvojče a NVIDIA Omniverse
Zaměření: Digitální dvojče
Komu již pomohlo: Continental Automotive Czech Republic
Garant: Tomáš Jochman
Místnost: RICAIP Testbed Praha, přízemí, budova B
Projekt NVIDIA Omniverse otevírá nové možnosti v oblasti digitálních dvojčat pro průmyslové využití. Umožňuje přesné simulace výrobních procesů, ověřování trajektorií robotů a detekci chyb v reálném čase. Díky realistickému vizuálnímu prostředí a generování náhodných scén podporuje efektivní trénování AI modelů pro rozpoznávání objektů a odhad 6D pozice. Ukážeme vám, jak lze celý proces integrovat do digitálního dvojčete a využít jej k bezpečnému testování i zefektivnění spolupráce. Představíme také výsledky výzkumu, které ukazují, jak Omniverse pomáhá překonat rozdíl mezi simulací a realitou a optimalizovat náročné průmyslové aplikace.
3: Monitoring a zeefektivnění procesů
Zaměření: Prediktivní údržba procesů, Datová analytika výroby
Komu již pomohlo: MHMP odbor životního prostředí, čištění dat z čidel zaplněnosti velkoobjemových odpadových nádob a optimalizace jejich svozů, ŠKODA AUTO, rozměrová kontrola kvality obrobených hlav motoru
Garant: Martin Macaš
Místnost: RICAIP Testbed Praha, přízemí, budova B
Při moderním vícerozměrném monitoringu procesů lze uplatnit strojové učení ve formě detekce anomálií či klasické klasifikace do několika tříd. Prvním krokem je s pomocí historických dat naučit detektory neefektivního, nesprávného či nestandardního procesu. Detekovaný problém pak diagnostikovat či vysvětlit, odstranit a tím optimalizovat celý proces. Tento postup ukážeme na příkladu monitoringu a zefektivnění procesu robotické montáže či procesu ukládání odpadu do velkoobjemových nádob.
4: Robotický 3D tisk z polymerů a kovů
Zaměření: Aditivní výroba, 3D tisk
Garant: Tomáš Jochman
Místnost: RICAIP Testbed Praha, přízemí, budova B
Robotický 3D tisk otevírá nové možnosti v aditivní výrobě, a to při samotné výrobě nebo při opravě existujících dílů. Díky velkému pracovnímu prostoru robota lze pracovat i s díly, které jsou tradičními 3D tiskárnami nevyrobitelné. Ukážeme vám i robotický 3D tisk s laserovou navařovací hlavou Meltio, která umožňuje tisk ze dvou kovových materiálů současně. Také představíme výsledky našeho výzkumu, které umožňují navrhovat postupy pro robotický 3D tisk s využitím digitálního dvojčete a optimalizovat celý proces.
5: Optimalizace výroby na příkladu galvanizační linky (sběr a analýza dat)
Zaměření: Analýza výroby na základě sběru dat, optimalizace
Komu již pomohlo: LAKUM-GALMA
Garant: Pavel Hradecký, Václav Kubáček
Místnost: RICAIP Testbed Praha, přízemí, budova B
Na příkladu inteligentního řízení galvanizační linky ukážeme, jak propojujeme data z ERP objednávek se skutečným chodem výroby (SCADA → PLC → MES) a nasazujeme algoritmy pro automatické rozvrhování a plánování, aby zdroje linky pracovaly vyváženě a průchodnost výroby se zvýšila. Digitalizujeme receptury, sbíráme a analyzujeme výrobní data, zavádíme automatickou podporu rozhodování a poskytujeme přehledné dashboardy pro management; tím zkracujeme průběžné doby, snižujeme závislost na expertních manuálních zásazích a otevíráme cestu k datově řízené povrchové úpravě kovů. Přijďte se podívat, jak můžeme posunout i Vaši výrobu do éry Průmyslu 4.0.
6: Optimalizace procesů ve výrobě, zdravotnictví, logistice, energetice, armádních systémech a další
Zaměření: Optimalizace procesů, AI v průmyslu, datově řízené metody
Komu již pomohlo: Škoda AUTO, PPL, ERA, EATON, Continental, Beckman Coulter, Siemens Energy, DECCI, ŘLP Praha, MÚÚÚ Písek, Blumenbecker, FN Hradec Králové, FN Motol, FN Královské Vinohrady, Purem Rakovník, Nemocnice Znojmo, Blumenbecker, Humanomed, Pointee
Garant: Přemysl Šůcha
Místnost: RICAIP Testbed Praha, přízemí, budova B

Naše skupina se zabývá analýzou, simulací a především optimalizací libovolných procesů. Optimalizační metody primárně stavíme na matematických metodách a rozšiřujeme je pomocí datově řízených metod a umělé inteligence, aby co nejlépe seděly na konkrétní potřeby každého provozu. S touto oblastí máme více jak 20ti leté zkušenosti.
7: Inteligentní rozhodování a plánování
Zaměření: Automatické plánování, inteligentní rozhodování
Garant: Lukáš Chrpa
Místnost: RICAIP Testbed Praha, přízemí, budova B
Zabýváme se výzkumem technik automatického plánování a inteligentního rozhodování. Převážně se zabýváme vývojem technik pro centralizované routování dopravy. Dále se zabýváme konceptem “plánování proti přírodě”, což umožní autonomním inteligentním entitám se deliberativně rozhodovat v dynamických prostředích, které mohou být ovlivněny “akty přírody”, či jiných agentů.
8: Řízení flexibilních továren
Zaměření: Flexibilní výroba, řízení výroby, automatizace pro malé série
Komu již pomohlo: Rockwell Automation, CertiCon, LEGO, ZŤS VaV, DEL
Garant: Petr Novák
Místnost:RICAIP Testbed Praha, přízemí, budova B
Pro řadu výrobních odvětví je v současné době charakteristický nárůst počtu variant vyráběných produktů. To významně snižuje efektivitu automatizačních metod navržených původně pro hromadnou výrobu. Modely řízená výroba umožňuje reagovat na měnící se požadavky výroby a efektivně vyrábět i malé série produktů.
10: Optimalizace prostorového uspořádání továren
Zaměření: Optimalizace výroby, prostorové uspořádání, AI v průmyslu
Komu již pomohlo: Škoda Auto, Continental, ZŤS VaV, DEL
Garant: Petr Kadera
Místnost: RICAIP Testbed Praha, přízemí, budova B
Pro efektivní provoz továren je důležité jejich prostorové uspořádání. Jeho návrh je s rostoucí složitostí výrobních postupů stále složitější. Metody umělé inteligence umožňují řešit složité úlohy s mnoha často protichůdnými kritérii. Umístit do výrobní haly co nejvíce výrobních linek, zajistit co nejkratší logistické cesty a zároveň k sobě neumisťovat technologie, které by se mohly negativně ovlivňovat.
11: Podpora efektivní přípravy svařování robotickou buňkou
Zaměření: Robotické svařování, automatizace programování, CAD/CAM integrace
Komu již pomohlo: ALAD CZ s.r.o., STP-Plast s.r.o.
Garant: Vladimír Smutný
Místnost: RICAIP Testbed Praha, přízemí, budova B
Překážkou pro nasazení robotických svařovacích buněk pro kusovou výrobu je cena přípravy programu pro robotickou buňku lidským programátorem. Nahrazení lidské expertízy automatickými postupy přípravy programů umožňuje eliminovat tuto překážku a automatizovati malosériovou či kusovou výrobu. V daném případě se automaticky generuje trajektorie robotu s 9-11 stupni volnosti ve stísněném prostoru omezeného hlavně tvarem výrobku. Vstupem do programu jsou výstupy z CADu (tvar výrobku) a CAMu (poloha a tvar svarů).
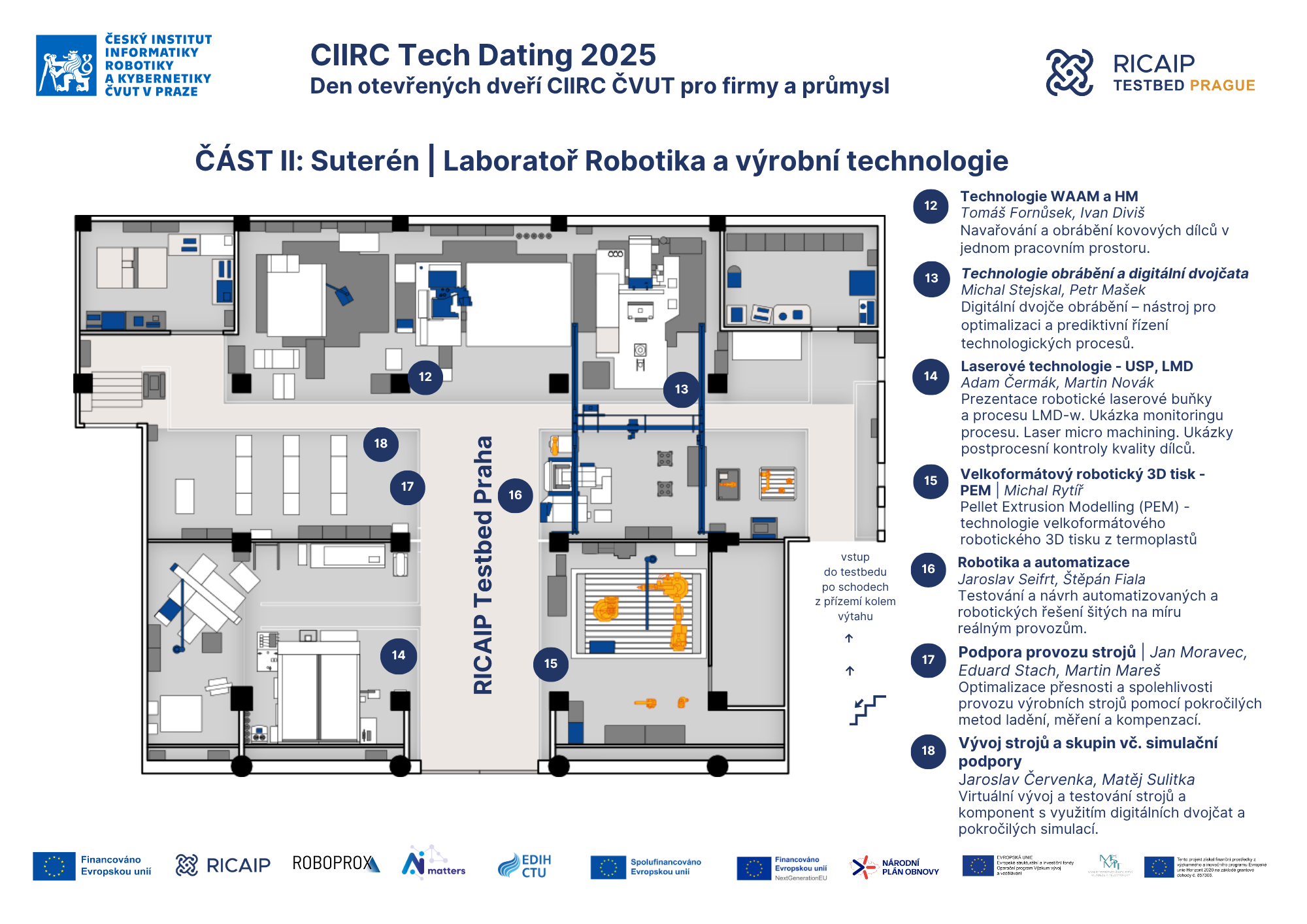
12: Technologie WAAM a HM
Zaměření: Aditivní výroba a 3D tisk
Komu již pomohlo: Tato technologie byla vyvinuta v rámci spolupráce RCMT ČVUT a strojírenské firmy Kovosvit MAS. Výhodnost použití HM technologie vyniká zejména u tvarově složitých dílců, kde se odebírá velké množství materiálu, jako jsou například lodní šrouby, Peltonova turbína, části některých forem apod.
Garant: Ing. Tomáš Fornůsek, Ing. Ivan Diviš
Místnost: RICAIP Testbed Praha, suterén, budova B
Technologie 3D tisku z kovu, plně vyvinutá v ČR, patří do kategorie Hybrid Manufacturing a umožňuje vytvářet kovové dílce navařováním pomocí elektrického oblouku a jejich obrábění v jednom pracovním prostoru s výrazně nižšími náklady. Stroj WeldPrint 5AX díky použité technologii 3D tisku z kovu umožňuje vytváření kovových dílů navařováním pomocí elektrického oblouku a jejich obrábění v jednom pracovním prostoru. Pokračující výzkum a vývoj se nyní orientuje především na zpracování nerezových, nástrojových a inconelových ocelí. Výhodou vyvíjené technologie je, že jejím uživatelem nemusí být pouze špičkové vývojové středisko velké firmy, ale může ji rentabilně využít i běžná malá a středně velká strojírenská firma.
13: Technologie obrábění a digitální dvojčata
Zaměření: Technologie
Komu již pomohlo: Zvyšování produktivity a eliminace chyb obrábění při zavádění náročných technologií, např. pro TOS Varnsdorf, BRAY, TOS Kuřim – OS, Kovosvit MAS, ŠMT, TAJMAC-ZPS, TGS nástroje-stroje-technologické služby, CNC Tvar a další.
Garant: Ing. Michal Stejskal, Ph.D., Ing. Petr Mašek, Ph.D.
Místnost: RICAIP Testbed Praha, suterén, budova B
Procesní digitální dvojče obrábění má řadu výhod – odhalí chyby dřív, než k nim dojde na stroji při skutečném obrábění, pomáhá optimalizovat výrobní procesy, šetřit náklady, zrychlovat výrobu, věrohodně predikuje výsledky obrábění, ale také pomáhá firmám, aby jejich výroba korespondovala s udržitelností. Digitální dvojčata významně přispívají ke zvyšování spolehlivosti výroby, zkracování časů realizace a přípravy výroby. Úspěšné uplatnění nacházejí pro prediktivní kontrolu a optimalizaci strategií NC obrábění ve fázi návrhu procesů, kde pomáhají optimalizovat jak procesní parametry, tak nastavení stroje pro dosažení vyšší produktivity, lepší kvality a přesnosti výroby. Vhodné oblasti nasazení jsou jak pro kusovou, tak hromadnou výrobu v oblasti energetického průmyslu, tenkostěnných dílců pro aerospace, výrobu forem apod. Účinně se uplatňují procesní digitální dvojčata také pro monitorování skutečných procesů na stroji. Na základě vyčítání rychlých dat (500 Hz) ze stroje lze realizovat real-time simulaci obrábění pomocí digitálního dvojčete a vyhodnocovat např. identifikaci opotřebení nástrojů. Tato aplikace je unikátní díky univerzálnosti nasazení na libovolné procesy obrábění a vede k lepšímu využití nástrojů s potenciálem významných úspor nákladů. Procesní digitální dvojčata jsou významným prostředkem digitalizace procesů a zavádění autonomních výrobních systémů.
14: Laserové technologie – USP, LMD
Zaměření: Technologie
Komu již pomohlo: Rotana, Dormer Pramet, PBS, European Cryogenics, Lintech, LaserTherm
Garant: Ing. Adam Čermák, Ph.D., Ing. Martin Novák
Místnost: RICAIP Testbed Praha, suterén, budova B
Testbed je vybaven pokročilou technologií USP (Ultra-short pulse) laserového obrábění, která umožňuje přesné a opracování různých typů materiálů, včetně ultra-tvrdých řezných a ostatních křehkých materiálů. Základ systému tvoří femtosekundový laser s možností generování tří vlnových délek 1030 až 343 nm o opakovací frekvenci 0,2 – 1 MHz, který je integrován s vysoce dynamickým galvo-skenovacím systémem a řízen prostřednictvím otevřeného řídicího rozhraní. Technologie umožňuje velmi přesné mikroobrábění, texturování povrchů na mikro- i nanoúrovni s vysokou reprodukovatelností. Díky extrémně krátké době interakce pulsů s materiálem je minimalizováno tepelné ovlivnění. To je klíčové při opracování citlivých materiálů nebo výrobě funkčních textur s vysokou mírou přesnosti. Pracoviště lze vhodně využít i pro selektivní ablaci (tzv. laser striping) a vrtání mikrootvorů, a další technologie, jejichž aplikovatelnost lze uplatnit oborově v medicíně, elektronice, mikrofluidiku.
Testbed je dále vybaven technologiemi robotické aditivní výroby, jako je laserová robotická buňka, která disponuje dvěma výměnnými pracovními hlavami pro aditivní technologii LMD (Laser Metal Deposition – metoda tvorby kovových dílců z laserem taveného prášku nebo drátu). Ty jsou pohybovány průmyslovým robotem KUKA řízeným systémem Sinumerik. Kromě výroby dílů s komplexním tvarem lze pracoviště s výhodou využít také pro opravy poškozených dílů, například částí nástrojů. Výhoda laserové technologie je v menším vneseném teplu do dílu oproti technologiím využívajícím elektrický oblouk, avšak stále při zachování dobré produktivity výroby. Díky tomu se v dílu tvoří menší zbytková napětí a nedochází k výrazným deformacím dílu po zchladnutí. Významným výzkumným tématem je inprocesní kontrola teplotního pole celého dílce. Cílem je omezit přehřátí materiálu, které způsobuje znehodnocení geometrie. Pokud je díl vyroben laserovým svazkem s výkonem optimalizovaným pro různé skupiny vrstev, výrazně se zlepšuje geometrická přesnost dílce a kvalita povrchu po navaření.
15: Velkoformátový robotický 3D tisk – PEM
Zaměření: Aditivní výroba a 3D tisk
Komu již pomohlo: Compotech, Bluetech, eForce Prague Formula, TGS nástroje-stroje-technologické služby
Garant: Ing. Michal Rytíř
Místnost: RICAIP Testbed Praha, suterén, budova B
Pellet Extrusion Modelling (PEM) je technologie velkoformátového robotického 3D tisku z termoplastů. Tisková hlavice ve formě extrudéru s podávacím šnekem je nesená robotem, který umožňuje tisknout dílce nejrůznějších tvarů a struktur. Zásadní rozdíl oproti klasické stolní 3D tiskárně je vysoká produktivita, neboť místo strunového filamentu se používají peletky termoplastu, a velký pracovní prostor využívající maximální dosah robotu. Technologie 3D tisku PEM dokáže vyrobit jakýkoliv dílec či tvar, ke kterému jsou dostupná digitální data v podobě 3D modelu. Velkoformátový 3D tisk má použití nejen v průmyslu, a to především v těchto aplikacích:
- formy pro kompozity – strojírenství
- nábytek a mobiliáře – design
- vakuové upínky – aerospace
- modely – architektura
- rychlé prototypování – engineering
Hlavními výzkumnými tématy v případě velkoformátového 3D tisku technologií PEM je monitoring tiskového procesu a zpětnovazební řízení rychlosti tisku pro dosažení homogenního dílce s dobrou provázaností jednotlivých vrstev a vyhovujícími mechanickými vlastnostmi. S tím souvisí i výzkum přípravy NC kódu pro robota a jeho dráhové řízení.
16: Robotika a automatizace
Zaměření: Robotika
Komu již pomohlo: Robotická montáž optických prvků, bin picking plechových výlisků, automatizace v potravinářství,…
Garant: Ing. Jaroslav Seifrt, Ing. Štěpán Fiala, Ph.D.
Místnost: RICAIP Testbed Praha, suterén, budova B
V oblasti robotiky a automatizace Testbed nabízí řešení automatizačních témat formou proof of concept a řešení složitých automatizačních úloh. Se zákazníky je prováděna analýza stávajících pracovišť a jsou identifikovány možnosti automatizace a robotizace jednotlivých částí i celých výrobních linek. Unikátní části navrhovaného řešení, přizpůsobené konkrétnímu pracovišti, jsou fyzicky testovány v našich laboratořích, které jsou vybaveny robotickými buňkami od širokého spektra výrobců – Fanuc, Kuka, ABB, Staubli a dalších. Testovány jsou jak specifické komponenty (např. úchopné hlavice, koncové efektory, přípravky), tak i procesní postupy a funkční operace, jako je použití vision systémů či provádění vysoce přesných manipulací. Pro testování je využíván 3D tisk a principy rapid prototypingu. Výsledky těchto testů tvoří základ pro přesnou simulaci celého řešení, například pomocí softwaru Visual Components. Simulace umožňuje provádět časové a prostorové analýzy, vizualizovat tok produktu výrobní linkou, připravovat logiku řízení a mnoho dalšího. Díky praktickým znalostem širokého spektra zařízení a výrobců není návrh vázán na konkrétního dodavatele – řešení je možné navrhnout na základě zkušeností s různými značkami, s důrazem na efektivitu výsledného řešení.
17: Podpora provozu strojů
Zaměření: Provoz strojů
Komu již pomohlo: Výrobcům a uživatelům obráběcích strojů např.: TOS Varnsdorf, TOSHULIN, TOS Kuřim – OS, Kovosvit MAS, TAJMAC-ZPS, SAHOS, TGS nástroje-stroje-technologické služby, TOS Hostivař, Slovácké strojírny, závod 08 TOS Čelákovice, TRENS SK, DN Solutions Co
Garant: Ing. Jan Moravec, Ph.D., Ing. Eduard Stach, Ph.D., doc. Ing. Martin Mareš, Ph.D.
Místnost: RICAIP Testbed Praha, suterén, budova B
Podpora provozu strojů zahrnuje klíčové technologie a metody zaměřené na zajištění vysoké přesnosti a spolehlivosti provozu obráběcích či obecně výrobních strojů. Tyto technologie zahrnují postupy ladění pohonů pro optimalizaci dynamického chování strojů ovlivňující kvalitu povrchu obrobku a efektivitu výroby, metody měření a kompenzace geometrických chyb a principy softwarové teplotní kompenzace pro minimalizaci vlivu teplotních deformací na výrobní přesnost. Demonstrace zahrne jak pokročilé diagnostické nástroje, tak praktické přístupy k optimalizaci přesnosti a výkonnosti obráběcích strojů v reálných provozních podmínkách.
18: Vývoj strojů a skupin vč. simulační podpory
Zaměření: Vývoj strojů
Komu již pomohlo: Optimalizace stavby obráběcích strojů pro řadu českých výrobců, např. TOS Varnsdorf, TOSHULIN, TOS Kuřim – OS, Kovosvit MAS, TAJMAC-ZPS, Slovácké strojírny, závod 08 TOS Čelákovice, Erwin Junker Grinding Technology, Strojírna TYC, SAHOS, TOS Hostivař a další
Garant: Ing. Jaroslav Červenka, Ing. Matěj Sulitka, Ph.D.
Místnost: RICAIP Testbed Praha, suterén, budova B
Vývoj strojů, funkčních celků a komponent musí splňovat požadavky zákazníků na funkčnost, provozní vlastnosti, výrobní produktivitu a v neposlední řadě cenu. Zkracování vývojových cyklů a krátké dodací lhůty současně tlačí na minimalizaci doby vývoje. Uvedené cíle je možné dosahovat díky podpoře pokročilých simulačních nástrojů a digitálních dvojčat, která ve virtuálním prostředí a na virtuálních prototypech umožňují ověřit navrhované vlastnosti a provozní chování strojů a skupin ve vazbě na jejich předpokládané technologické využití. Umožňují tak odstranit chyby, které by jinak vyžadovaly výrobu a testování fyzických prototypů. Tím je možné významně šetřit náklady a zkracovat dobu vývoje. Představeny budou ukázky vývoje a virtuálního testování strojů, frézovacích hlav, vřeten, nebo původní postupy vedoucí k minimalizaci geometrických chyb strojů. Při vývoji jsou aplikovány pokročilé optimalizační postupy topologické a parametrické optimalizace, simulace teplotního chování, nebo provázané modely interakce pohonů a regulace pohonů s nosnou strukturou. Pomocí těchto modelů lze úspěšně navrhovat systémy s vyváženými parametry řízení a vlastnostmi mechanické struktury.
19: Autonomní vozidla
Zaměření: Autonomní vozidla, AI řízení, real-time software
Komu již pomohlo: Spolupráce s Porsche Engineering, Škoda Auto, Digiteq Automotive, TÜV SÜD
Garant: Michal Sojka
Místnost: JP-A122 (laboratoř autonomních vozidel)
Zabýváme se (nejen) autonomními vozidly od elektroniky, přes nízkoúrovňový software (real-time, safety) až po aplikace využívající umělou inteligenci k řízení vozidel. Experimenty provádíme jednak v simulátorech, ale vždy je pak ověřujeme i na reálných vozidlech. Realizovali jsme projekty automatického parkování, automatická jízda v pruhu (ALKS) a momentálně se zabýváme průjezdy křižovatkou.
20: Ovládání robota hlasem a gesty a vnímání rizik při robotické manipulaci
Zaměření: Kolaborativní robotika
Komu již pomohlo: Robotwin, Factorio Solutions, Bosch Research
Garant: Karla Štěpánová
Místnost: A404 (reálné demo)
Ovládání robota hlasem, gesty a demonstracemi umožňuje jednoduché a přirozené přeprogramování robotů v nových situacích a také přirozený způsob vysvětlení robotovi specifických podmínek dané úlohy či prostředí. Pro to, aby kinesteticky naučené trajektorie bylo možné v novém prostředí bezpečně vykonávat, vyvinuli jsme také modul pro bezpečnou exekuci, který umožní zastavení robota v případě nečekané situace.
21: Vizuální navigace mobilních prostředků v prostředí bez infrastruktury
Zaměření: Vizuální navigace, autonomní mobilní prostředky, flexibilní výrobní systémy
Komu již pomohlo: Třinecké železárny a.s. , HOPAX a.s., Vojenský Opravárenský Podnik (VOP) s.p.
Garant: Libor Přeučil/Tomáš Pivoňka, Viktor Kozák
Místnost: B320 (laboratoř Inteligentní a mobilní robotiky)
Principy a postupy pro plně autonomní vizuální navigaci mobilních prostředků (manipulátory, logistické roboty, vozidla, atp.) ve složitém a proměnlivém prostředí. Vhodné pro UGV i UAV pro indoor, outdoor a za přítomnosti neurčitosti (proměnlivé prostředí, lidé). Alternativní řešení využívají i klasické postupy založené na LIDARech. Řešení může být koncipováno i jako ekonomická přídavná jednotka pro jakýkoliv mobilní systém drive-by-wire. Ideální řešení pro vysoce flexibilní výrobní systémy, automatické sklady, dohledovou činnost, atp.
22: Plánování a rozvrhování pro robotiku, zejména logistiku
Zaměření: Optimalizace robotických procesů, logistické algoritmy, warehouse management
Komu již pomohlo: GrenzeBach GmBH, SwissLog AG, Wienerberger A.G., ATG s.r.o, TFE France (power-grid caretaker)
Garant: Libor Přeučil/Miroslav Kulich, David Zahrádka
Místnost: B320 (laboratoř Inteligentní a mobilní robotiky)
Vývoj pokročilých optimalizačních algoritmů přináší podstatné zvýšení produktivity procesů. Provádíme výzkum, vývoj a navrhujeme řešení (SW) optimalizačních postupů převážně pro NP-úplné problémy: úlohy Fetch and Carry, Any-Time plánování, optimalizace v distribučních sítích, řešení směrovacího problému, s aplikacemi např. do warehouse a fleet managementu.
23: Pokročilá robotická manipulace: Inspekční úloha, pick&place
Zaměření: Robotická manipulace, optické navádění, strojové vidění
Komu již pomohlo: Škoda Auto (2x), ATG s.r.o., LEGO (2x)
Garant: Libor Přeučil/Lukáš Bertl, Viktor Kozák
Místnost: B320 (laboratoř Inteligentní a mobilní robotiky)
Motivováno úlohami inspekce a/nebo uchopování dílů, jejichž umístění ve 3D prostoru není přesně známo a/nebo je řešení standardními postupu obtížné. Řešené úlohy zahrnují problematiku cílově orientovaného optického navádění manipulátoru na díl, nebo jeho část, v náhodné 3D poloze vč. optimálního sekvencování více takových operací. Zahrnuje též metody a postupy robustního strojového vidění pro průmyslové aplikace a velmi obtížné podmínky užitím monokulárních RGB(D) kamer.