
Příspěvek „CosyPose: Consistent multi-view multi-object 6D pose estimation” spoluautorů Yanna Labbého (Inria), Justina Carpentiera (Inria), Mathieu Aubryho (ENPC) a Josefa Šivice (CIIRC ČVUT) získal pět ocenění v soutěži pro určení 6D polohy objektu na konferenci ECCV 2020.
Odhadování 6D polohy objektů z obrazu je jednou z klíčových úloh pro autonomní systémy vybavené vizuálními senzory. S pomocí přesně odhadnuté polohy pak robot může objekt uchopit a dále s ním manipulovat. Jako příklad si můžete představit domácího robotického pomocníka, který dokáže automaticky naplnit myčku nádobí nebo robota ve výrobě, který manipuluje s předměty na výrobní lince na základě vizuálních vstupů.
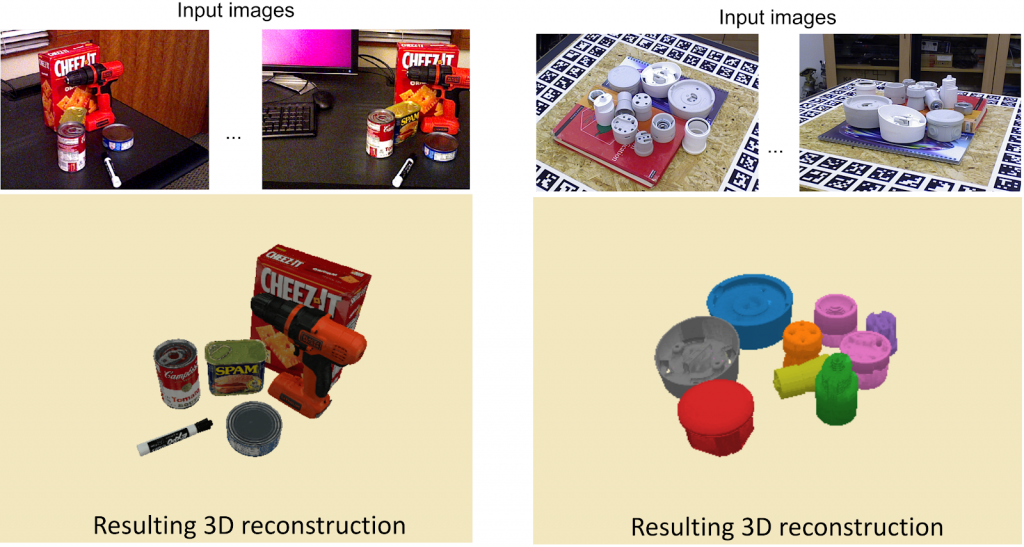
Nově vyvinutá metoda CosyPose odhaduje 6D polohu více objektů ve scéně zachycených jedním nebo několika vstupními obrazy. Hlavní inovací je spojení hlubokých neuronových sítí s metodami odhadování geometrických transformací z více obrazů.
CosyPose
Příklad odhadování přesné 6D pozice více objektů. Vstupem je sada RGB obrazů zachycujících scénu se známými objekty (obr. nahoře). Výstupem je rekonstrukce polohy jednotlivých objektů ve scéně a poloha kamer (obr. dole).
Získané ocenění
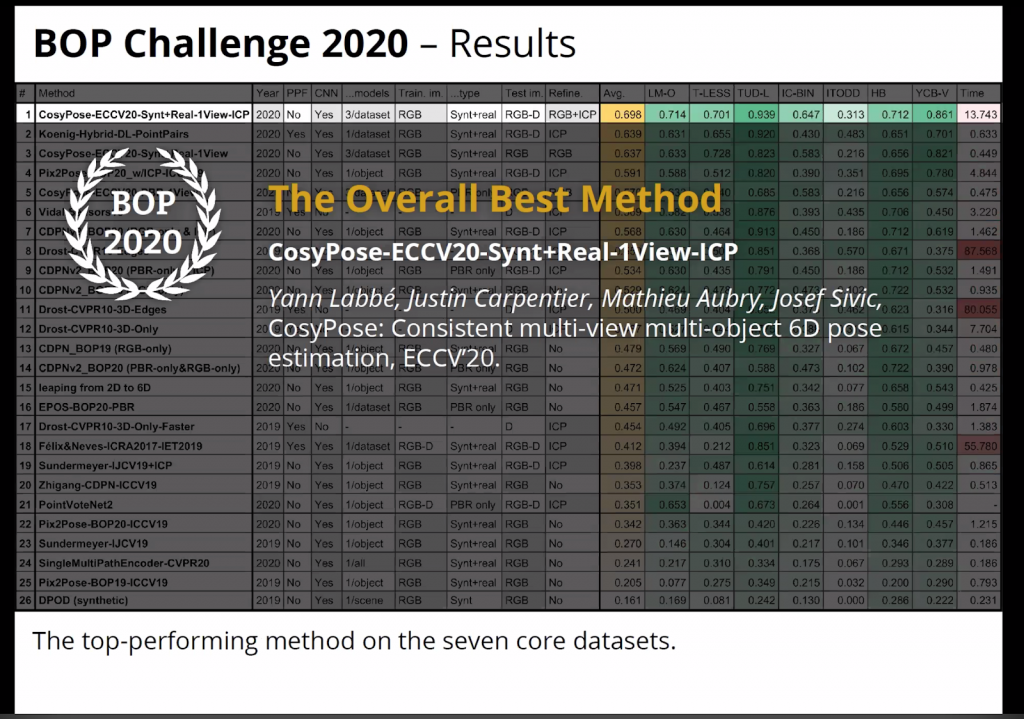
Vyvinutá metoda získala 5 ocenění, včetně „Celkově nejlepší metody“ (The Overall Best Method) v soutěži pro určení 6D pozice objektu na konferenci ECCV 2020, a s výrazným náskokem překonala konkurenční metody v několika kategoriích. Výsledky soutěže jsou shrnuté v této prezentaci a detailněji popsány v tomto článku.
Konference ECCV 2020
Soutěž se konala na Evropské konferencí počítačového vidění (European Conference on Computer Vision – ECCV 2020). ECCV je jednou ze tří hlavních konferencí počítačového vidění (společně se CVPR a ICCV) a je zařazena mezi 100 nejcitovanějších časopisů a konferencí ve všech oblastech vědy podle Google Scholar.
![]()
